



Why a Robotic Pollinator for Greenhouses May Be Coming Soon
Researchers at West Virginia University have come up with a robotic pollinator that can assist humans in greenhouse environments by pollinating various crops.
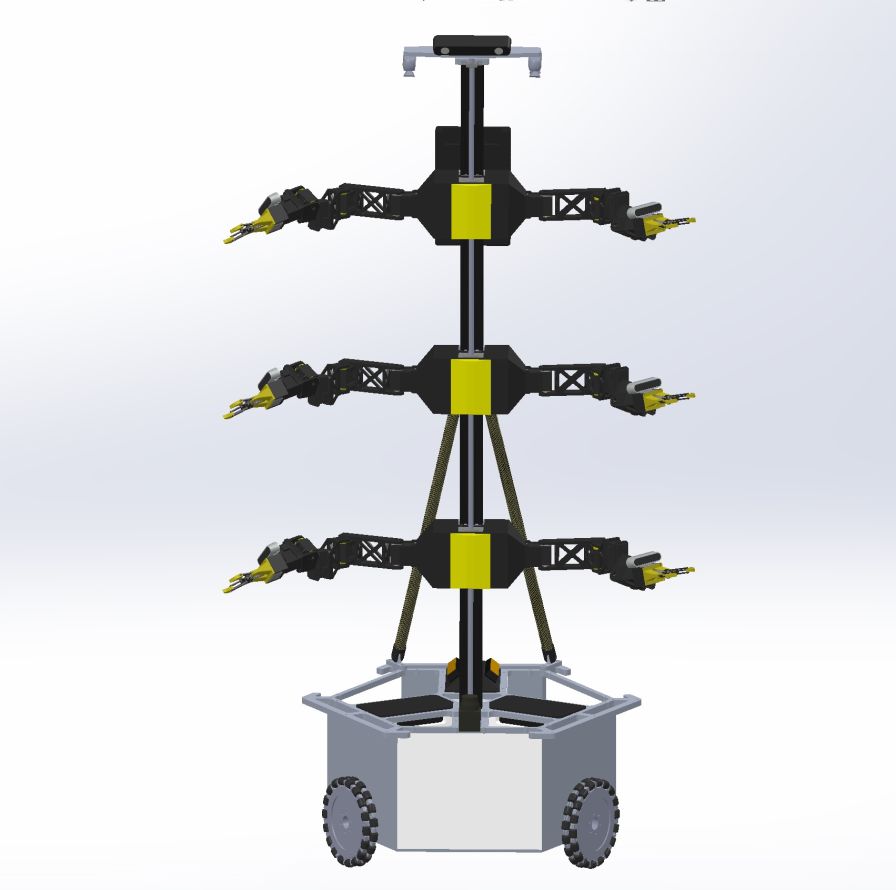
A team led by Yu Gu, Associate Professor in the Department of Mechanical and Aerospace Engineering, is creating StickBug, a six-armed robot. Gu’s robotic pollination proposal, which was submitted to the National Robotics Initiative, was selected for $750,000 in funding from USDA. Joining Gu on the project are Jason Gross, Associate Professor and Associate Chair for Research, Mechanical and Aerospace Engineering, and Nicole Waterland, Associate Professor of Horticulture and Director of Controlled Environments.
“StickBug maps out the environment, and once the robot has a general idea of the environment, it will build up a more detailed mapping of the plants and knows where the flowers are and which flower needs to be pollinated,” Gu says. “It will make a plan on what to do. Then, it will get close to each of the plants, start swinging its six arms, and start pollinating.”
According to Gu, the six arms are mainly for improving the efficiency and effectiveness of the robot. For example, some flowers could be in hard-to-reach places and the robot may need to use two arms. One arm for grabbing the branch, and the other arm to pollinate the flower.





The robot is responsible for the time-consuming tasks of flower inspection, mapping, pollination, and development tracking. This allows growers the freedom to focus on other greenhouse tasks.
“The focus of the end product is to try to lower the barrier of entry to make it more practical so that growers would want to adopt a robotic technology in their greenhouse operation,” Gross says.
The long-term goals for the robot are to care for individual crops efficiently, improve food security during insect declines, support indoor agriculture, and provide services beyond what insects can do such as collecting data on the crops.
Evaluation of StickBug’s pollination effectiveness will be performed in the WVU Evansdale Greenhouse using blackberries and tomatoes.
“Tomato is probably one of the most economically-important crops in the country and it also needs help for pollination,” Gu said. “Another major reason is that tomato plants [grow] year-round. There are always tomato flowers to do experiments on.”
Waterland noted that tomato and blackberry crops are both being produced more and more in high tunnels and greenhouses, where researchers see potential utilization of the robotic pollination system.
Continue reading at WVUToday.
Subscribe to eNewsletter
